Уравновешивание геодезических сетей сгущения и систем ходов плановой съемочной сети
X0 = 2725,84 [pεx]= 2.34 [pfx]= -0,04 [p]= 17
y0=4402.09 [pfy]= +0,07 [pεy]= -3,84
X= 2725,98 y=4117,95
Контроль: ωx[p]=0,06 ωy[p]= 0,05
2.1.2.9. Вычисляем приращения координат и их суммы (см. таблицу 12), а затем - координаты узловой точки по всем трем хода. Результаты вычислений записать в графы 2 и 13 таблицы 14.
Проверка допустимости линейных невязок
|
№№ ходов |
Si+j м |
Fx=xi-xj |
Fy=yi-yj |
fабс |
Fотн м |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1+2 |
1600 |
+0.18 |
0 |
+0.18 |
1:8900 |
|
2+3 |
1923 |
-0.18 |
+0.32 |
+0.37 |
1:5200 |
2.1.2.10. Оцениваем качество измерений, вычислив для этого невязки по ходам: по первому - вместе со вторым и по второму - вместе с третьим.
Для этого составляем разности координат по соответствующим парам ходов:
Fx=xi-xj
Fy=yi-yj (34)
Одна пара ходов берется с наименьшими периметрами. Подсчеты невязок выписываем внизу таблицы 14.
Относительные невязки не должны превышать 1:1000.
2.1.2.11. Вычисляем веса значений координат узловой точки по формуле:![]()

в которой
Si - длина соответствующего хода, выражаем в километрах;
k — произвольный коэффициент, выбираем с таким же расчетом, как и при вычислении дирекционных углов. Результаты вычислений записываем в графу 8 таблица 14.
2.1.2.12. По формуле общей арифметической средины:
где x0 , y0 - приближенные значения координат Х и У,
εxi ,εyi - величины определенные по формулам:
εxi=xi-x0
εyi=yi- y0 (37)
Вычисляем окончательные значения координат узловой точки Х и У. Полученные значение записываем в таблицу 12.
2.1.2.13. Вычисляем невязки приращений координат для каждого хода по формулам:
fx=xi-x0
fy=yi-y0 (33)
и записываем их в графы 5 и 10 таблицу 14.
Выполняем контроль вычисления Х и У и невязок по формулам:
[pfx]=-ωx[p] (39) , [pfy]=-ωy[p] (40)
где ωx и ωy - ошибка округлений при делении [pεx] и [pεy] на [p].
2.1.2.14. Вычисляем для каждого хода в ведомости координат (таблица 12) вторично невязки по формулам:
где ![]() и
и ![]() - измеренные суммы приращений координат по каждому ходу;
- измеренные суммы приращений координат по каждому ходу;
Xi и Yi - координаты начальной точки соответствующего хода;
X3 и Y3 - координаты узловой точки (точка 3).
Эти невязки сличают с полученными ранее.
Данные подсчитываем по каждому ходу fабс и fотн. Если последнее не превышают 1:1000, то невязки в приращениях координат распределяем на соответствующие приращения с противоположными знаками, пропорционально длине линий.
Затем в графах 8 и 9 таблица 12 вычисляем исправленные приращения координат.
2.1.2.15. По исправленным приращениям координат вычисляем координаты всех точек (графы 10 и 11 таблица 12).
2.2 Уравновешивание углов сети теодолитных ходов по способу полигонов профессора В.В.Попова
2.2.1 Задание
Уравновесить углы и вычислить дирекционные углы сторон сети, изображенной на рисунке 6.
Исходные данные.
|
№№ варианта |
Дирекционные углы | |
|
αАВ |
αСD | |
|
24 |
353°08,2' |
35°20,1' |
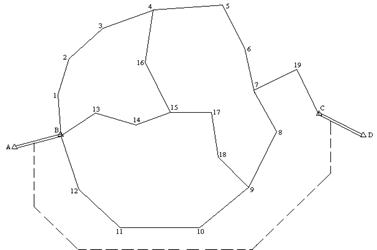
Рис.6 Схема полигонов
2.2.2 Порядок решения
2.2.2.1. Подсчитываем число полигонов, включая и несомкнутый полигон между твердыми (исходными) сторонами АВ и CD.
2.2.2.2. Исправить непосредственно на схеме полигонов (рисунок 6) сумму углов при каждой внутренней узловой точке (15 и 9) для соблюдения условий горизонта (360°), внеся поправки поровну на каждый угол до десяти долей минуты. Поправки записываем на схеме у соответствующих углов в десятых долях минуты. Например, поправку +0,1' записываем в виде +1.
2.2.2.3. Подсчитываем сумму измеренных углов в каждом полигоне с учетом поправок за условие горизонта и записываем ее на схеме внутри соответствующего полигона (см. рисунок 6). Несомкнутый полигон IV, включающий твердые линии АВ и CD условно считаем сомкнутыми при помощи пунктирной линии. Число углов, сторон или направлений по этой пунктирной линии в процессе вычислений считается равным нулю.
Под практической суммой углов в каждом полигоне записываем сумму углов теоретическую, причем по полигону IV теоретическую сумму углов следует вычислять по формуле:
![]()
Вычисляем для каждого полигона полученную невязку в сумме углов
![]()
и сравниваем ее с предельной,
![]()
где n- число углов полигона.
Полученные предельные невязки записываем на схеме (см. рис. 6) под соответствующими суммами углов в каждом полигоне.
2.2.2.4. Составляем схему сети теодолитных ходов для уравновешивания углов (рисунок 7). На этой схеме выписываем номера узловых точек и полигонов. Внутри каждого полигона под его номером заготовить табличку невязок и около каждого звена, кроме пунктирного, таблички поправок. В таблички записываем полученные невязки.
2.2.2.5. Вычисляем красные числа для каждого звена всех полигонов по правилу: красное число звена равно числу направлений в звене, деленному на число направлений в полигоне.
При этом каждую линию в замкнутых полигонах |,||, и ||| а в полигоне IV твердые линии АВ и СD считаем каждую за одно направление. Поэтому на чертеже пунктирная линия, условно замыкающая полигон, вычерчивается у середины твердых линий, включая в полигоне не целые линии, а одно направление.