Цифровая фототриангуляция для создания топографических карт
![]()
![]() , (1.2)
, (1.2)
![]()
![]()
![]()
где ![]() - плоские координаты точек снимков;
- плоские координаты точек снимков;
![]() - направляющие косинусы, являющиеся функциями элементов взаимного ориентирования снимков;
- направляющие косинусы, являющиеся функциями элементов взаимного ориентирования снимков;
![]() - элементы внутреннего ориентирования снимков.
- элементы внутреннего ориентирования снимков.
На основе (1.1) получим уравнение вида
![]() (1.3)
(1.3)
Уравнение (1.3) не линейны по отношению к элементам взаимного ориентирования снимков. Их решают итерационным методом, предварирительно приведя их к линейному виду разложением в ряд Тейлора, ограничиваясь производными первого порядка малости;
3) определение фотограмметрических координат точек одиночных моделей. Выполняется по формулам прямой фотограмметрической засечки:
![]()
 (1.4)
(1.4)
![]() , (1.5)
, (1.5)
где ![]() – трансформированные координаты точек левого снимка,
– трансформированные координаты точек левого снимка,
![]() – трансформированный продольный параллакс.
– трансформированный продольный параллакс.
 . (1.6)
. (1.6)
 . (1.7)
. (1.7)
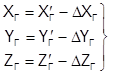
4) подсоединение независимых моделей.
На данном этапе перевычисляются координаты точек в единую систему координат всей сети. Обычно в качестве системы координат маршрутной сети принимают фотограмметрическую систему координат первой модели маршрута. Для подсоединения моделей используются координаты связующих точек.
В качестве исходного принимается уравнение связи координат точек последующей модели с предыдущей:
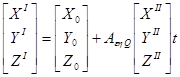 , (1.8)
, (1.8)
где ![]() - координаты точек в системе координат маршрутной модели (сети);
- координаты точек в системе координат маршрутной модели (сети); ![]() - координаты этих же точек в системе координат последующей модели;
- координаты этих же точек в системе координат последующей модели;
![]() - матрица направляющих косинусов, вычисленных через углы
- матрица направляющих косинусов, вычисленных через углы ![]() ;
;
t -масштабный коэффициент;
![]() - координаты начала системы координат последующей модели в системе координат маршрутной сети.
- координаты начала системы координат последующей модели в системе координат маршрутной сети.
Этап подсоединения модели состоит из двух процессов. Сначала вычисляются ![]() , а известными будут
, а известными будут ![]() .
.
Затем вычисляются координаты точек присоединяемой модели в системе координат маршрутной сети. Известными будут ![]() и координаты
и координаты ![]() точек модели, полученные по формулам (1.4). По формулам (1.9) вычисляются координаты
точек модели, полученные по формулам (1.4). По формулам (1.9) вычисляются координаты ![]() присоединяемой модели в системе координат маршрутной сети.
присоединяемой модели в системе координат маршрутной сети.
5) внешнее ориентирование сети.
На данном этапе перевычисляются координаты точек сети в заданную внешнюю систему координат. Необходимо минимум три опорных точки.
Для внешнего ориентирования сети используются координаты X, Y, Z опорных точек и уравнения вида:
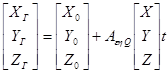 . (1.9)
. (1.9)
где ![]() координаты начала системы координат сети;
координаты начала системы координат сети;
![]() фотограмметрические координаты точек сети;
фотограмметрические координаты точек сети;
![]() геодезические координаты точек местности.
геодезические координаты точек местности.
В начале известны координаты опорных точек в геодезической системе и фотограмметрические координаты этих точек, полученные из уравнивания сети. В качестве неизвестных выступают 7 элементов ориентирования геодезической сети: ![]() .
.
Определив 7 этих неизвестных, будут определяться геодезические координаты ![]() всех точек сети ПФТ.
всех точек сети ПФТ.
6) исключение деформации сети.
Деформацию сети ПФТ можно описать различными полиномами.
Например, обобщённого типа:
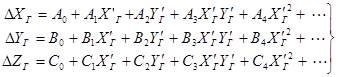 , (1.10)
, (1.10)
где ![]() – это коэффициенты деформации,
– это коэффициенты деформации, ![]() – геодезические координаты точек сети, полученные на этапе 5 из геодезически ориентированной сети.
– геодезические координаты точек сети, полученные на этапе 5 из геодезически ориентированной сети.
Из-за деформации сети после ее геодезического ориентирования на опорных точках будут получены расхождения координат :
![]() (1.11)
(1.11)
Исключение деформации сети состоит из 2 процессов: сначала будут известны ![]() ,
, ![]() опорных точек, неизвестными будут коэффициенты
опорных точек, неизвестными будут коэффициенты ![]() , а исходными для определения коэффициентов будут уравнения (1.10).
, а исходными для определения коэффициентов будут уравнения (1.10).
После определения коэффициентов деформации вычисляется величина разности координат ![]() характеризующие деформацию сети для всех точек сети по формулам (1.10).
характеризующие деформацию сети для всех точек сети по формулам (1.10).
Затем вычисляются исправленные координаты точек сети:
 . (1.12)
. (1.12)
1.3.2 Построение блочных сетей фототриангуляции методом связок
Наиболее строгим методом построения блочных сетей пространственной фототриангуляции аналитическим и цифровым способами по сравнению с методом независимых моделей является метод связок[2]. В основе метода связок лежат уравнения коллинеарности проектирующих лучей:
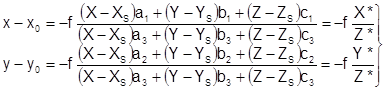 , (1.13)
, (1.13)
В уравнении будут известны f, x0, y0,x, y. Неизвестны элементы внешнего ориентирования снимков ![]() , также X, Y, Z – координаты точек сети ПФТ.
, также X, Y, Z – координаты точек сети ПФТ.
Уравнения (1.13) нелинейные и решаются итерационным методом.
На основе (1.13) имеем уравнение поправок вида: