Система автоматического регулированияРефераты >> Технология >> Система автоматического регулирования
Содержание
Введение
1. Анализ динамических характеристик звеньев САР
2. Передаточные функции разомкнутой и замкнутой САР
3. Исследование устойчивости системы регулирования
4. Оценка качества регулирования на основе корневых показателей
5. Исследование переходного процесса и определение основных
показателей качества регулирования
6. Исследование переходного процесса и определение параметров
системы с ПИД-регулятором
7. Анализ частотных характеристик замкнутой САР
8. Исследование частотных свойств системы и определение основных показателей качества регулирования
9. Сравнение динамических свойств и показателей качества регулирования исходной системы и системы с ПИД-регулятором
Заключение
Список использованных источников
Введение
В число научных дисциплин, образующих науку об управлении, входит теория автоматического управления и регулирования. Вначале она создавалась для изучения статики и динамики процессов автоматического управления техническими объектами производственными, энергетическими, транспортными и т.п. Основное ее значение сохранилось и в наше время, хотя в последние годы ее выводами и результатами начинают пользоваться и для изучения динамических свойств системы управления не только 'технического характера, но и экономического, организационного, биологического и т. д.
Для осуществления автоматического управления техническим процессом создается система, состоящая из управляемого объекта и связанного с ним управляющего устройства. 11ри этом система должна выполнять заданные ей функции с требуемой точностью, несмотря на инерционные свойства и на неизбежные помехи.
В данной курсовой работе рассматривается следящая система управления, предназначенная для воспроизведения входного сигнала. В следящей системе выходная величина воспроизводи т изменение входной величины, причем автоматическое устройство реагирует на рассогласование между входной и выходной величинами. Следящая система имеет обратную связь выхода с входом, которая, по сути дела, служи т для измерения результата действия системы.
Следящие системы применяются, в основном, для дистанционного управления самыми разнообразными объектами, а также для телеуправления.
Согласно техническом)- заданию, необходимо рассчитать автоматическое управляющее устройство (регулятор) системы, при введении которого система будет удовлетворять предъявленным к ней в техническом задании требованиям.
При выполнении расчетов целесообразно использовать пакет прикладных программ (HI II I) MathCAD.
1. Анализ динамических характеристик звеньев САР
В соответствии с заданной структурной схемой САР содержит безынерционное звено 1, безынерционное звено 2, интегрирующее с замедлением звено, апериодическое звено.
Проведем анализ перечисленных звеньев и рассмотрим их основные характеристики.
![]() Безынерционное звено 1
Безынерционное звено 1
![]() Передаточная функция безынерционного звена 1 имеет вид
Передаточная функция безынерционного звена 1 имеет вид
![]() Переходная функция
Переходная функция
В соответствии с этим переходная характеристика представляет коэффициенту передачи звена.
|
Рис. 2 - Переходная характеристика безынерционного звена 1 |
Амплитудно-частотная характеристика этого звена представляет собой линию, параллельную оси абсцисс.
Аналогичный вид имеет логарифмическая амплитудно-частотная характеристика.
Интегрирующее звено с замедлением
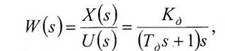
Интегрирующее звено с замедлением имеет передаточную функцию
|
|
 Переходная функция интригующего с замедлением звена определяется выражением
Переходная функция интригующего с замедлением звена определяется выражением
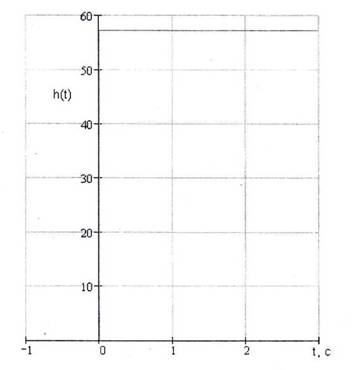
График переходной характеристики звена приведен на рисунке. При больших t он представляет собой прямую линию.
Рис. 3 - Переходная характеристика интегрирующего с замедлением звена
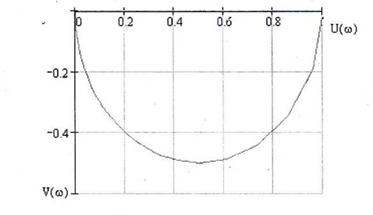
![]() Амплитудно-фазовая характеристика интегрирующего с замедлением звена представлена на рисунке 4.
Амплитудно-фазовая характеристика интегрирующего с замедлением звена представлена на рисунке 4.
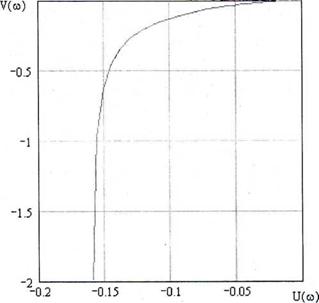
Рис. 4 - Амплитудно-фазовая характеристика интегрирующего с замедлением звена
Амплитудно-частотная характеристика интегрирующего с замедлением звена представлена на рисунке 5.
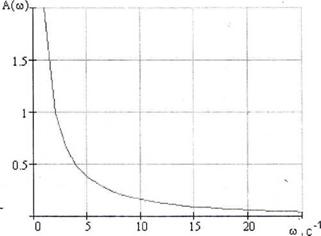
Рис. 5 - Амплитудно-частотная характеристика интегрирующего с замедлением звена
Фазо-частотная характеристика интегрирующего с замедлением звена представлена на рисунке 6.
|
|
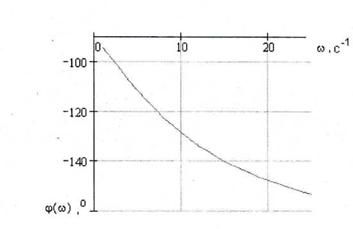
Рис. 6 - Фазо-частотная характеристика интегрирующего с замедлением звена.
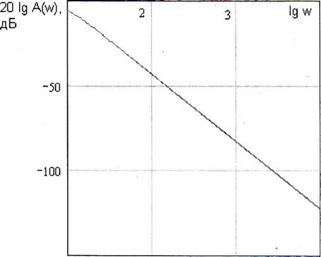
Рис.7 - ЛAЧX интегрирующего с замедлением звена
Апериодическое звено
Переходная характеристика апериодического звена определяется выражением
|
|

График переходной характеристики звена приведен на рисунке.
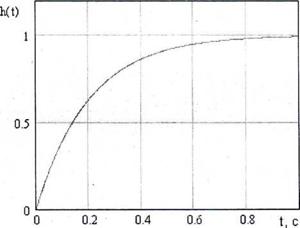
Рис. 7 - Переходная характеристика апериодического звена Амплитудно-фазовая характеристика апериодического звена представлена на рисунке 8. Она представляет собой полуокружность.