Страница
4
![]()
то можно получить фиктивный частичный расход в этом отсеке
![]()
Затем значения qфs умножаются на коэффициент К, обеспечивающий переход от фиктивного расхода к действительному. Этот коэффициент должен быть заранее известен для данного створа по результатам специальных наблюдений. Действительные значения qs в специальном вычислительном блоке последовательно суммируются (интегрируются) по мере движения судна вдоль гидроствора от одного берега к другому за время Т, что позволяет получить полный расход воды
 (8)
(8)
При косоструйном течении растет uп и us становится более сложным и требует учета угла косоструйности αк, который заранее не известен. Однако если угол косоструйности не слишком велик (менее 200), можно использовать ту же формулу (8). Для компенсации возникающих при этом погрешностей интеграцию скоростей рекомендуется производить дважды (от одного берега к другому и обратно), а в качестве результата измерений принимать полусумму полученных значений.
Одно из главных метрологических преимуществ горизонтальной интеграции скоростей течения состоит в том, что она устраняет погрешность интерполяции средних скоростей на вертикалях, а при вертикальной дискретизации модели расхода воды эта погрешность является основной.
Выражение (8) относится к случаю, когда интеграция скоростей течения производится в поверхностном слое при незаглубленном измерителе скорости (z=0). Если же на реке наблюдается заметное волнение, появляется плывущий мусор или ледяные образования, приходится опускать измеритель ниже поверхности воды на глубину z. Измеряемый при этом расход Qz окажется не равным фиктивному расходу Qп. Соответствующий поправочный коэффициент определяется по зависимости, полученной И. Ф. Карасевым:
![]()
где β = (bл+bп)/B – непрозондированная часть ширины русла (см. рис.1); φ = hмакс /hcp – коэффициент полноты сечения; m = 24,0 м0,5/с – эмпирический коэффициент Базена.
Переход к действительному расходу совершается по соотношению
![]()
Точность интеграционного измерения скорости течения существенно зависит от скорости перемещения судна по створу uc: при ее увеличении возникают погрешности измерения не только из-за малости времени интеграции Т, но и из-за уменьшения uп/uc. Чтобы не допустить чрезмерного возрастания рассматриваемой погрешности, скорость перемещения судна uc должна быть ограничена некоторым достаточно малым значением, при котором еще сохраняется устойчивость судна на курсе. Опыт показывает, что эта скорость близка к поверхностной скорости потока uп.
2.2 Измерение расходов воды с использованием физических эффектов
Для измерения скоростей течения (а значит, и расходов воды) могут быть использованы различные физические эффекты: Доплера, ультразвуковые и электромагнитная индукция.
Доплеровский метод измерения скоростей течения реализуется в двух вариантах: с использованием оптических квантовых генераторов и радиолокатора.
При лазерных измерениях источником информации о скорости потока служат спектральные характеристики света. Если поток, движущийся со скоростью v, просвечивается когерентным монохроматическим излучением с частотой ω0 и волновым вектором Ао, а рассеянное излучение при частоте ωi наблюдается в направлении волнового вектора As, то значение v устанавливается непосредственно по разности частот и векторов
v = (ωi — ω0)/(As — A0).
Рассеяние света создается частицами взвесей, которые содержатся в потоке или вводятся в него. Лазерные установки пока нашли применение в трубопроводах и лабораторных лотках (рис. 2 а).
Радиолокационный вариант эффекта Доплера положен в основу измерителя поверхностных скоростей течения ГР-117, разработанного в ГГИ Г. А. Юфитом. Прибор состоит из блока радиоаппаратуры, рупорной антенны, блоков анализа характеристик радиоволн, прямых и отраженных от неоднородностей на поверхности потока — турбулентных возмущений и ветровых волн (рис. 2 б).
Для определения скорости течения в установке использована зависимость
![]()
где λ— длина радиоволны, составляющая 3,2 см.
Измерения производятся с гидрометрического мостика, люльки или с берега. Минимальное значение измеряемой скорости составляет 0,4 м/с, максимальное 15 м/с, индикация результата измерения - цифровая. Радиолокационный измеритель испытан в полевых условиях. В ближайшей перспективе первые партии прибора будут выпущены для производственного использования.
Ультразвуковой (акустический) метод заключается в посылке импульсов ультразвука по косому галсу в направлении течения и против него с регистрацией двух временных интервалов — соответственно Т1 и Т2. Ультразвуковое зондирование может производиться в различных направлениях в плане и поперечном сечении потока, но для определенности принимается горизонтальное положение ультразвукового луча, а угол, который он должен составлять с динамической осью, равным 30—60°.
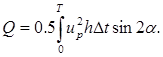
Рис.2. Варианты измерения скоростей потока с использованием эффекта Доплера.
а – лазерная установка: 1 – фотоприемник, 2 – трубопровод, 3 – разделительная пластина, 4 – источник света, 5 – зеркало, б – радиолокационный измеритель скоростей течения: 1 – радиоблок, 2 – рупорная антенна, 3 – установочная тренога, 4 – настил моста.
Для выполнения измерений необходимо выбирать прямолинейный участок с устойчивым и свободным от растительности руслом. В потоке не должно содержаться пузырьков воздуха, рассеивающих ультразвук.
Преобразователи-приемники акустических (ультразвуковых) сигналов устанавливаются на свайных опорах или непосредственно на береговых откосах (рис. 3 а). Опорные конструкции должны допускать возможность перемещения преобразователей при колебаниях уровня без нарушения их взаимной ориентировки.
Для определения скорости потока принимаются расчетные формулы, не содержащие в явном виде скорость звука в воде, что исключает необходимость в аппаратуре для ее измерения (как известно, скорость звука не остается постоянной и зависит от температуры и минерализации воды).
Ультразвуковые системы для измерения скорости течения делятся на кабельные или бескабельные соответственно тому, имеется или отсутствует кабель, связывающий приемно-передающие устройства на противоположных берегах.
Кабельный вариант (рис. 3 б) функционирует следующим образом. В начальный момент времени производится одновременное излучение ультразвуковых импульсов в точках I и II. Ультразвуковые импульсы распространяются в потоке по траектории, составляющей угол а с направлением течения. Одновременно с запуском передающих устройств 2 запускается измеритель временных интервалов 3, который останавливается после приема импульсов на противоположных берегах.