Выполнение гидрографического исследования на штокмановском газоконденсатном месторождении
Очевидно, что вероятность выявления цели зависит от количества отражений от нее. Принято, что цель может быть выявлена не менее чем 3 отражениями от нее. Интервал между посылками по дистанции прямо пропорционален скорости буксировки и полосе обзора.
Для полосы обзора 200 метров временной интервал между посылками будет равен 0.266 секунды. При скорости буксировки 4 узла (2.05 м/сек), интервал по дистанции составит 0.55 метра. С учетом ширины диаграммы направленности, полосы обзора шириной 200м, со 100 % перекрытием будут выявлены цели размерами 1.2 - 1.5 метра.
На рисунке 6.1 представлен график вероятности выявления донных объектов (предел разрешающей способности), в зависимости от полосы обзора и скорости буксировки гидролокатора бокового обзора.
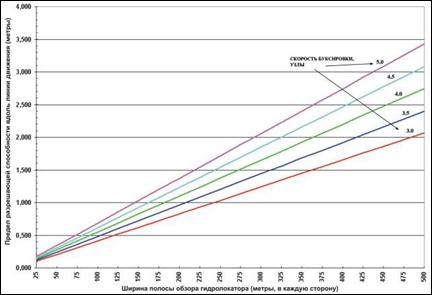
Рисунок 6.1 Вероятность выявления объектов гидролокатором бокового обзора
Для надежного выявления целей на морском дне высота буксировки должна быть в пределах 10-20% от наклонной дальности. В свою очередь, чем меньше наклонная дальность (полоса обзора) гидролокатора, тем выше детальность исследований. При принятой полосе обзора 175 - 200 метров, необходимая высота буксировки над дном составит 20 - 30 метров. При наклонной дальности обзора гидролокатора 175 - 200 метров и расстоянии между профилями 100 метров будет обеспечено 100% перекрытие при работе на площади и полосе прокладки трубопроводов.
Изыскания будут проводиться при непрерывном движении судна со скоростью 3.5 – 4.5 узлов. Задача поддержания необходимой высоты буксировки «рыбы» над дном (20 – 30 метров) будет решаться изменением длины вытравленного кабеля, с помощью пульта дистанционного управления лебедкой. Длина вытравленного кабеля составит около 3.5 – 4 глубин моря (для скорости буксировки 3.5 – 4.5 узлов), и достигнет 1200 - 1400 метров. Очевидно, что при резких перепадах глубин дна, вероятность касания грунта и повреждения буксируемого тела весьма велика. Для уменьшения вероятности аварийных ситуаций рабочее место оператора будет оснащено монитором, отображающим, с помощью специальной программы, положение буксируемого тела в пространстве на фоне цифровой батиметрической модели дна (полученной на рекогносцировочном этапе работ), так как это показано на рисунке 6.2.
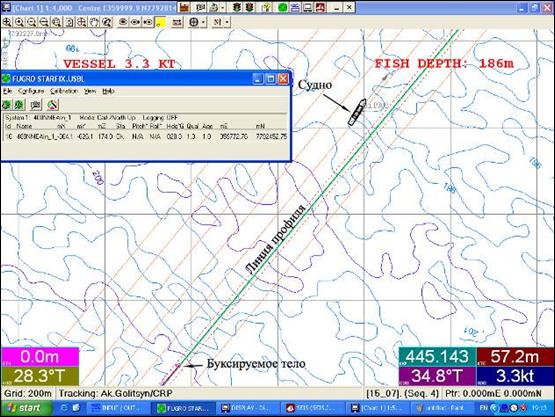
Рисунок 6.2 Окно контроля положения буксируемого тела
Эта информация позволит оператору предвидеть резкие изменения рельефа дна и своевременно предпринимать меры для исключения аварийной ситуации.
Прибрежные участки будут отрабатываться с использованием катеров. Полоса обзора 50 – 100 метров, расстояние между профилями 15 - 20 метров.
Для работ будет использоваться малогабаритный гидролокатор «С-MAX». Дополнительно, непосредственно вблизи берега, будут отработаны по 2 профиля вдоль береговой линии.
6.2.2 Магнитометрия
Основной задачей магнитометрии является идентификация и нанесение на карту потенциальных геологических и техногенных опасностей, геотехнических явлений которые могут повлиять на проектирование, прокладку и эксплуатацию трубопровода и морских нефтегазопромысловых сооружений.
В процессе выполнения магнитометрических наблюдений будут применяться высокочувствительные морские магнитометры SeaSPY и Magis.
Магнитометры будут буксироваться за подводным геофизическим комплексом C3D на расстоянии от 10 м до 30 м от него с помощью кевларового кабеля.
6.2.3 Навигационное обеспечение промера дна и геофизических работ
Координирование судна будет осуществляться на основе определений места с дискретностью 1 секунда по радиосигналам стандартной точности на частотных диапазонах L1 и L2 спутниковой навигационной системы «Navstar». Для этого будут использованы специализированные 12-ти канальные 2-х частотные фазовые навигационные приемники «Starfix HP/XP». Одновременно с приёмом спутниковых радиосигналов системы «Navstar» в специализированные навигационные приёмники будет поступать высокоточный сигнал дифференциальной коррекции от ККС «Нарьян-Мар» РДПС «Starfix», через геостационарный спутник «EA-sat». Минимальный угол возвышения геостационарного спутника «EA-sat» по результатам предшествующих работ составил 7˚, что обеспечило устойчивый приём сигнала. Цифровая регистрация поступающей навигационной информации будет выполняться с дискретностью 1 раз в секунду на основном компьютере сбора информации (формат NMEA-0183). Для этой цели будет использован промышленный компьютер «Advantech» с программным обеспечением «Starfix Suite». Ожидаемая точность позиционирования изыскательского судна – не хуже ±0.5 м.
Навигационная привязка буксируемого тела будет осуществляться с использованием ультракороткобазисной системы гидроакустической навигации. Маяк-ответчик будет крепиться к несущему кабелю, в непосредственной близости от буксируемого тела.
Применяемые системы ультракороткобазисной подводной навигации в комплексе с периферийным оборудованием, обеспечат точность привязки буксируемых устройств, при низком уровне естественных шумов, не хуже 1% от наклонной дальности. Для максимальных рабочих глубин 350 м, при наклонной дальности 1000 м это составит 10 м. Данные позиции геофизических устройств будут в реальном времени передаваться и регистрироваться на системы сбора геофизических данных.
Для геодезической привязки буксируемых устройств в прибрежной зоне, (в зоне неэффективного использования УКБС) будут использоваться модели переменных офсетов. В модели офсетов вводятся:
· Значения длины вытравленного кабеля;
· Превышение точки буксировки над буксируемым устройством;
· Значения курса судна;
· Значения путевого угла судна;
· Процентное соотношение (модель) влияния курса и путевого угла на снос устройства;
· Коэффициент провиса кабеля.
По значениям длины вытравленного кабеля и превышению вычисляется горизонтальное проложение длины кабеля. По значениям, курса, путевого угла и модели сноса вычисляется курсовой угол на устройство.
Для устройств, буксируемых по поверхности, применяется практика соотношения влияния курса и путевого угла как 50% / 50%. Это означает, что курсовой угол на устройство находится как биссектриса угла между линией курса и линией пути судна.
Для устройств, буксируемых на глубине, практикуется соотношение курс / путевой угол как 10% / 90%. Также применяется коэффициент провиса кабеля 0.05.
6.2.4 Батиметрическая съемка рельефа дна
Батиметрическая съемка рельефа дна на площади ШГКМ и вдоль морской части трубопровода будет выполняться при помощи многолучевого эхолота Reson SeaBat 8111. Ширина полосы покрытия для различных глубин приведены в таблице 6.1.
Таблица 6.1
Ширина полосы покрытия МЛЭ, в зависимости от глубины.
|
Глубина, м |
Полоса покрытия, м |
|
100 |
700 |
|
200 |
1500 |
|
300 |
2200 |
|
350 |
2600 |