Страница
3
Следовательно, множество степеней свободы кинематической пары в многоосных суставах требует для выполнения каждого определенного движения:
а) выбора необходимой траектории,
б) управления движением по траектории (направлением и величиной скорости) и
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Звенья тела как рычаги и маятники
Разбиение тела человека на звенья позволяет представить эти звенья как механические рычаги и маятники, потому что все эти звенья имеют точки соединения, которые можно рассматривать либо как точки опоры (для рычага), либо как точки отвеса (для маятника).
Рычаг характеризуется расстоянием между точкой приложения силы и точкой вращения. Рычаги бывают первого и второго рода.
Рычаг первого рода или рычаг равновесия состоит только из одного звена. Пример – крепление черепа к позвоночнику.
Рычаг второго рода характеризуется наличием двух звеньев. Условно можно выделить рычаг скорости и рычаг силы в зависимости от того, что преобладает в их действиях. Рычаг скорости дает выигрыш в скорости при совершенствовании работы. Пример – локтевой сустав с грузом на ладони. Рычаг силы дает выигрыш в силе. Пример – стопа на пальцах.
Поскольку тело человека выполняет свои движения в трехмерном пространстве, то его звенья характеризуются степенями свободы, т.е. возможностью совершать поступательные и вращательные движения во всех измерениях. Если звено закреплено в одной точке, то оно способно совершать вращательные движения и мы можем сказать, что оно имеет три степени свободы.
Закрепление звена приводит к образованию связи, т.е. связанному движению закрепленного звена с точкой закрепления.
Поскольку руки и ноги человека могут совершать колебательные движения, то к механике их движения применимы те же формулы, что и для простых механических маятников. Основные вывод их них – собственная частота колебаний не зависит от массы качающегося тела, но зависит от его длины (при увеличении длины частота колебаний уменьшается).
Делая частоту шагов при ходьбе или беге или гребков при плавании или гребле резонансной (т.е. близкой к собственной частоте колебаний руки или ноги), удается минимизировать затраты энергии. При наиболее экономичном сочетании частоты и длины шагов или гребков человек демонстрирует существенный рост работоспособности. Простой пример: при беге высокий спортсмен имеет большую длину шага и меньшую частоту шагов, чем более низкорослый спортсмен, при равной с ним скорости передвижения.
Рычаги в биокинематических цепях
Костные рычаги — звенья тела, подвижно соединенные в суставах под действием приложенных сил, — могут либо сохранять свое положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Все силы, приложенные к звену как рычагу, можно объединить в две группы: а) силы или их составляющие, лежащие в плоскости оси рычага (они не могут повлиять на движение вокруг этой оси) и б) силы или их составляющие, лежащие в плоскости, перпендикулярной к оси рычага (они могут влиять на движение вокруг оси в двух противоположных направлениях). Рассматривая действие сил на рычаг, учитывают только силы, направленные по ходу движения (движущие) и против него (тормозящие).
Когда группы сил приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим или рычагом первого рода (рис. 2 (а)), а когда по одну сторону — одноплечим, или рычагом второго рода (рис. 2 (6)). Для разных мышц, прикрепленных в разных местах костного звена, рычаг может быть разного рода. Так, относительно своих сгибателей предплечье (при работе против веса груза) представляет собой одноплечий рычаг; относительно же мышц-разгибателей (при удержании груза над головой) — двуплечий рычаг.
При преодолевающих движениях сила сокращающихся мышц (их равнодействующая тяга) — движущая сила, при уступающих движениях сила растягиваемых мышц (их равнодействующая тяга) — тормозящая. Силы сопротивления направлены противоположно действию мышц.
Каждый рычаг имеет следующие элементы (рис. 2 (в)):
а) точку опоры (0),
б) точки приложения сил,
в) плечи рычага (расстояния от точки опоры до точек приложения сил — l),
г) плечи сил (расстояния от точки опоры до линий действия сил — опущенные на них перпендикуляры— d).
Мерой действия силы на рычаг служит ее момент относительно точки опоры (произведение силы на ее плечо).
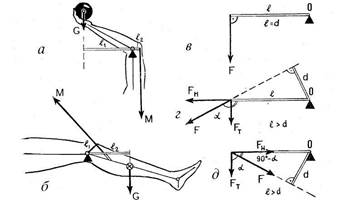
Рис. 2. Костные рычаги: а — двуплечий, 6 — одноплечий; вращающая составляющая (Ft) и укрепляющая (FH) силы при углах ее приложения: в — в прямом, г — тупом, д — остром
Механические свойства костей и суставов
Механические свойства костей определяются их разнообразными функциями; кроме двигательной, они выполняют защитную и опорную функции. Так кости черепа и грудной клетки защищают внутренние органы, а кости позвоночника и конечностей выполняют опорную функцию.
Выделяют 4 вида механического воздействия на кость: растяжение, сжатие, изгиб и кручение.
Установлено, что прочность кости на растяжение почти равна прочности чугуна. При сжатии прочность костей еще выше. Самая массивная кость – большеберцовая (основная кость бедра) выдерживает силу сжатия в 16-18 кН.
Менее прочны кости на изгиб и кручение. Однако регулярные тренировки приводят к гипертрофии костей. Так, у штангистов утолщаются кости ног и позвоночника, у теннисистов – кости предплечья и т.п.
Механические свойства суставов зависят от их строения. Суставная поверхность смачивается синовиальной жидкостью, которую хранит суставная сумка. Синовиальная жидкость обеспечивает уменьшение трения в суставе примерно в 20 раз. При этом при снижении нагрузки на сустав жидкость поглощается губчатыми образованиями сустава, а при увеличении нагрузки она выжимается для смачивания поверхности сустава и уменьшения коэффициента трения.
Прочность суставов, как и прочность костей, небеспредельна. Так, давление в суставном хряще не должно превышать 350 Н/см2. При более высоком давлении прекращается смазка суставного хряща и увеличивается опасность его механического стирания.
Биомеханические особенности костной системы
Двигательная деятельность человека требует согласованной работы организма в целом, но главная роль при этом принадлежит двигательному аппарату. С механической точки зрения двигательный аппарат человека представляет собой механизм, состоящий из сложной системы рычагов, приводимых в действие мышцами. Однако при изучении движений человека и причин, их вызывающих, было бы неправильно ограничиваться только представлениями механики. Для того, чтобы понять устройство двигательного аппарата и принцип его действия, необходимо иметь в виду биологическую природу "механизмов" человеческого тела. Анализ деятельности двигательного аппарата с биологической точки зрения позволяет вскрыть своеобразие устройства и принципа действия "живых механизмов". Таким образом, изучая движения человека, необходимо хорошо знать, как устроен его опорно-двигательный аппарат с точки зрения биомеханики. Это означает, что следует ясно представлять себе принципы строения его пассивной (кости и их соединения) и активной (мышечная система) частей. В отличие от анатомии, которая изучает все детали строения тела, для биомеханики важно выявить именно те особенности строения, от которых зависят свойства органов опоры и движения, а также их участие в выполнении двигательной функции.