Страница
5
Стаи термитов, на благо общества
Кроме разработки новых материалов, ученые постоянно сообщают о технологических открытиях, которые базируются на «интеллектуальном потенциале» природы. Например, в октябре 2003 года в исследовательском центре Xerox в Пало Альто разработали новую технологию подающего механизма для копиров и принтеров.
В устройстве AirJet разработчики скопировали поведение стаи термитов, где каждый термит принимает независимые решения, но при этом стая движется к общей цели, например, построению гнезда.
Сконструированная в Пало Альто печатная схема оснащена множеством воздушных сопел, каждое из которых действует независимо, без команд центрального процессора, однако в то же время они способствуют выполнению общей задачи — продвижению бумаги. В устройстве отсутствуют подвижные части, что позволяет удешевить производство. Каждая печатная схема содержит 144 набора по 4 сопла, направленных в разные стороны, а также 32 тыс. оптических сенсоров и микроконтроллеров (приложение рис. №9).
Бегающие и прыгающие роботы
Но самые преданные адепты бионики — это инженеры, которые занимаются конструированием роботов. Сегодня среди разработчиков весьма популярна точка зрения, что в будущем роботы (подробнее о робототехнике см. здесь) смогут эффективно действовать только в том случае, если они будут максимально похожи на людей. Ученые и инженеры исходят из того, что им придется функционировать в городских и домашних условиях, то есть в «человеческом» интерьере — с лестницами, дверями и другими препятствиями специфического размера. Поэтому, как минимум, они обязаны соответствовать человеку по размеру и по принципам передвижения. Другими словами, у робота обязательно должны быть ноги (колеса, гусеницы и прочее не подходит для города). Но у кого копировать конструкцию ног, если не у животных?
В направлении создания прямоходящих двуногих роботов дальше всех продвинулись ученые из Стенфордского университета. Они уже почти три года экспериментируют с миниатюрным шестиногим роботом, гексаподом, построенным по результатам изучения системы передвижения таракана.
Первый гексапод был сконструирован 25 января 2000 г. (приложение рис. №10) Сейчас конструкция бегает весьма шустро — со скоростью 55 см (более трех собственных длин) в секунду — и так же успешно преодолевает препятствия.
В Стенфорде так же разработан одноногий прыгающий монопод человеческого роста, который способен удерживать неустойчивое равновесие, постоянно прыгая. Как известно, человек перемещается путем «падения» с одной ноги на другую и большую часть времени проводит на одной ноге. В перспективе ученые из Стенфорда надеются создать двуногого робота с человеческой системой ходьбы (приложение рис. №11).
Заключение
Концепция бионики отнюдь не нова. К примеру, еще 3000 лет назад китайцы пытались перенять у насекомых способ изготовления шелка. Но в конце ХХ века бионика обрела второе дыхание, современные технологии позволяют копировать миниатюрные природные конструкции с небывалой ранее точностью. Так, несколько лет назад ученые смогли проанализировать ДНК пауков и создать искусственный аналог шелковидной паутины - кевлар. В этом материале я перечислел несколько перспективных направлений современной бионики и привел самые известные случаи заимствований у природы.
В последнее десятилетие бионика получила значительный импульс к новому развитию. Это связано с тем, что современные технологии переходят на гига- и наноуровень и позволяют копировать миниатюрные природные конструкции с небывалой ранее точностью. Современная бионика в основном связана с разработкой новых материалов, копирующих природные аналоги, робототехникой и искусственными органами.
Природа открывает перед инженерами и учеными бесконечные возможности по заимствованию технологий и идей. Раньше люди были не способны увидеть то, что находится у них буквально перед носом, но современные технические средства и компьютерное моделирование помогает хоть немного разобраться в том, как устроен окружающий мир, и попытаться скопировать из него некоторые детали для собственных нужд.
Приложение
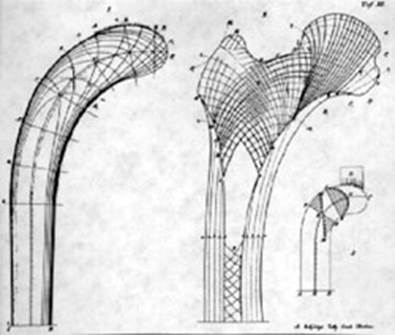
Костная структура головки бедренной кости
Рис. №1
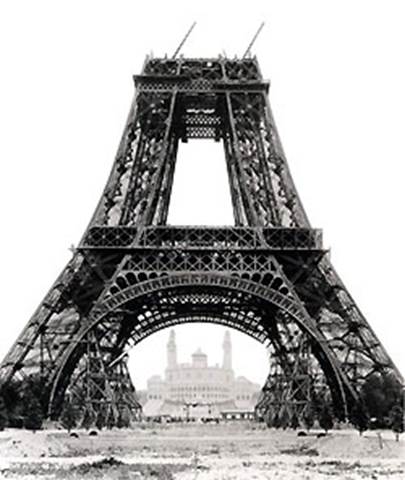
Основание Эйфелевой башни напоминает костную структуру головки бедренной кости
Рис. №2

Плод дурнишника прицепился к рубашке
Рис. №3
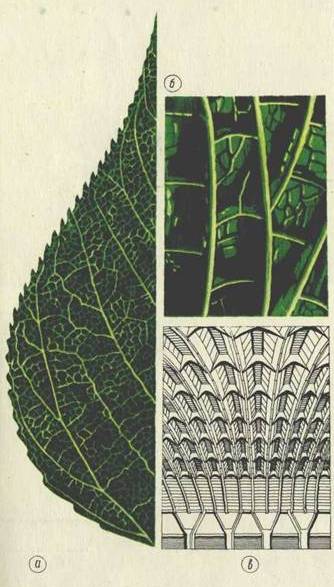
Сходства строение листа и свода главного зала Туринской выставки
Рис. №4
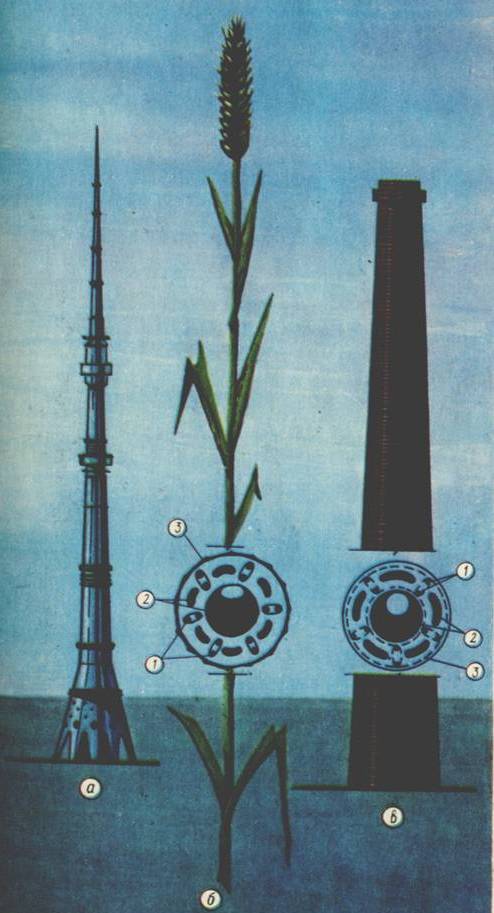
Строение стеблей травянистых растений и современных высотных труб, телебашен
Рис. №5
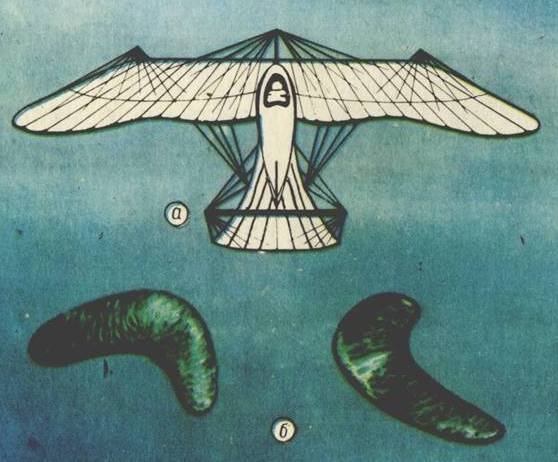
Семя образец для формы крыльев
Рис. №6
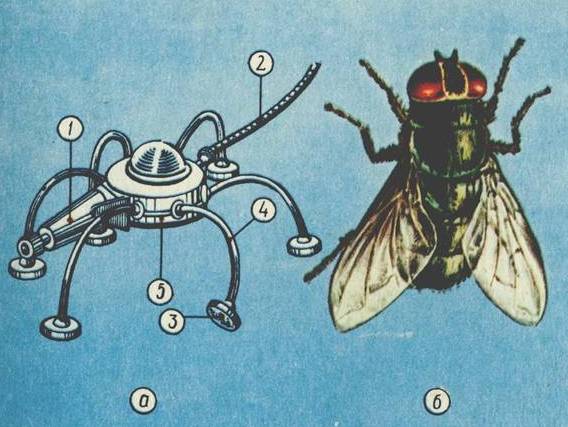
Робот ползающий, как муха
Рис. №7
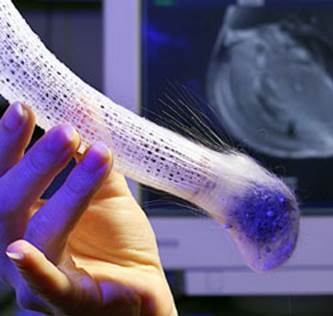
Скелет глубоководных губок рода Euplectellas построен из высококачественного оптоволокна
Рис. №8
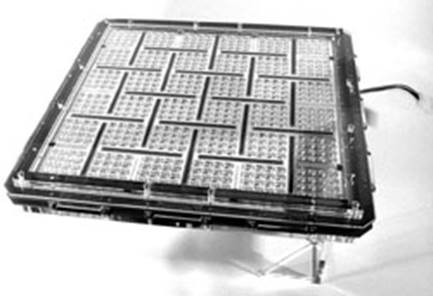
В новой печатной схеме, созданной в исследовательском центре Xerox (Пало Альто), отсутствуют подвижные части (она состоит из 144 наборов по 4 сопла в каждом)
Рис. №9

Миниатюрный, длиной около 17 см., шестиногий робот (гексапод) из Стенфордского университета уже бегает со скоростью 55 см/сек
Рис. №10

Монопод ростом с человека способен удерживать неустойчивое равновесие, постоянно прыгая (Стенфордский университет)
Рис. №11
Список литературы
Бионика в школе. Ц.Н.Феодосиевич, Г.И. Иванович, Киев, 1990.
Живие приборы. Ю.Г.Симвков, М., 1986.
Тайны бионики. И.И.Гармаш, Киев, 1985.
Моделирование в биологии, пер. с англ., под ред. Н. А. Бернштейна, М., 1963.
Вопросы бионики. Сб. ст., отв. ред. М. Г. Гаазе-Рапопорт, М., 1967.
Мартека В., Бионика, пер. с англ., М., 1967.
Крайзмер Л. П., Сочивко В. П., Бионика, 2 изд., М., 1968.