Описание систем управления беспилотными летательными аппаратамиРефераты >> Авиация и космонавтика >> Описание систем управления беспилотными летательными аппаратами
Инерциальная система БЛА
Ключевым моментом в упомянутой цепочке является «измерение состояния системы».То есть координат местоположения, скорости, высоты, вертикальной скорости, углов ориентации, а также угловых скоростей и ускорений. В бортовом комплексе навигации и управления, разработанном и производимым ООО «ТеКнол», функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС). Имея в своем составе триады инерциальных датчиков микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр, и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации. МИНС разработки ТеКнола – это полная Инерциальная система, в которой реализован алгоритм бесплатформенной ИНС, интегрированной с приемником системы спутниковой навигации. Именно в этой системе содержится «секрет» работы всего комплекса управления БЛА. По сути, одновременно работают три навигационных системы в одном вычислителе по одним и тем же данным. Мы их называем «платформами». Каждая из платформ реализует свои принципы управления, имея свои «правильные» частоты (низкие или высокие). Мастер-фильтр выбирает оптимальное решение с любой из трех платформ в зависимости от характера движения. Этим обеспечивается устойчивость системы не только в прямолинейном движении, но и при виражах, некоординированных разворотах, боковом порывистом ветре. Система никогда не теряет горизонт, чем обеспечиваются правильные реакции автопилота на внешние возмущения и адекватное распределение воздействий между органами управления БЛА.
Бортовой комплекс управления БЛА
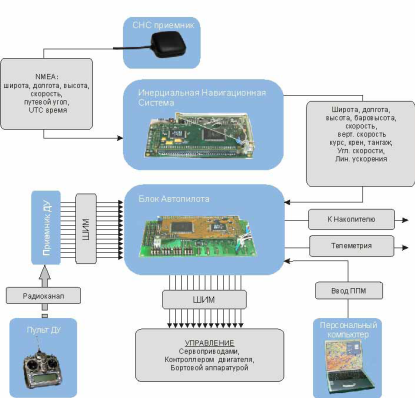
В состав Бортового Комплекса Навигации и Управления БЛА входят три составных элемента (Рисунок 1).
1. Интегрированная Навигационная Система;
2. Приемник Спутниковой Навигационной системы
3. Модуль автопилота.
Модуль автопилота осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно-модулированных) сигналов, сообразно законам управления, заложенным в его вычислитель. Помимо управления БЛА, автопилот программируется на управление бортовой аппаратурой:
• стабилизация видеокамеры,
• синхронизированное по времени и координатам срабатывание затвора
фотоаппарата,
• выпуск парашюта,
• сброс груза или отбор проб в заданной точке
и другие функции. В память автопилота может быть занесено до 255 поворотных пунктов маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета.
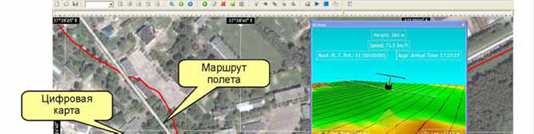
В полете автопилот также обеспечивает выдачу в канал передачи телеметрической информации для слежения за полетом БЛА (Рисунок 2).
А что же тогда представляет собой «квазиавтопилот»? Многие фирмы сейчас декларируют, что обеспечивают своим системам автоматический полет с помощью «самого маленького в мире автопилота».
Наиболее показательный пример такого решения — продукция канадской фирмы “Micropilot”. Для формирования сигналов управления здесь используют «сырые» данные – сигналы от гироскопов и акселерометров. Такое решение по определению не является робастным (устойчивым к внешним воздействиям и чувствительным к условиям полета) и в той или иной степени работоспособно только при полете в стабильной атмосфере.


Любое существенное внешнее возмущение (порыв ветра, восходящий поток или воздушная яма) чревато потерей ориентации летательного аппарата и аварией. Поэтому все, кто когда-либо сталкивался с подобной продукцией, рано или поздно понимали ограниченность таких автопилотов, которые никак не могут быть использованы в коммерческих серийных системах БЛА.
Более ответственные разработчики понимая, что необходимо настоящее навигационное решение, пытаются реализовать навигационный алгоритм с применением известных подходов Калмановской фильтрации.
К сожалению, и здесь не все так просто. Калмановская фильтрация — это всего лишь вспомогательный математический аппарат, а не решение задачи. Поэтому невозможно создать робастную устойчивую систему, просто перенося на MEMS интегрированные системы стандартный математический аппарат. Требуется тонкая и точная настройка на конкретное приложение. В данном случае – для маневренного объекта крылатой схемы. В нашей системе реализован более чем 15-ти летний опыт разработки инерциальных систем и алгоритмов комплексирования ИНС и GPS. К слову сказать, в мире только несколько стран обладают ноу-хау инерциальных систем. Это
Россия, США, Германия, Франция и Великобритания. За этим ноу-хау стоят научные, конструкторские и технологические школы, и по меньшей мере
наивно думать, что такую систему можно разработать и изготовить «на коленке» в институтской лаборатории или в ангаре аэродрома. Дилетантский подход здесь, как и во всех прочих случаях, чреват в конечном счете финансовыми потерями и потерей времени. Почему столь важен автоматический полет применительно к задачам, решаемым предприятиями топливно-энергетического комплекса? Понятно, что сам воздушный мониторинг не имеет альтернативы. Контроль за состоянием трубопроводов и других объектов, задачи охраны, мониторинга и видеонаблюдения лучше всего решаются с применением летательных аппаратов. А вот снижение издержек, обеспечение регулярности полетов, автоматизация сбора и обработки информации — здесь, совершенно справедливо уделяется внимание беспилотной технике, что и доказывает высокий интерес специалистов к проходящей выставке и форуму. Однако, как мы видели на выставке, беспилотные системы также могут представлять собой сложные и дорогие комплексы, требующие поддержки, обслуживания, создания наземной инфраструктуры и служб эксплуатации. В наибольшей степени это относится к комплексам, изначально созданным для решения военных задач, а теперь спешно адаптируемым к хозяйственным применениям. Отдельно остановимся на вопросах эксплуатации. Управление БЛА — задача для хорошо подготовленного профессионала. В армии США операторами БЛА становятся действующие пилоты ВВС после годовой подготовки и тренинга. Во многих аспектах это сложнее, чем пилотирование самолета, и, как известно, большинство аварий беспилотных ЛА вызваны ошибками пилота-оператора. Автоматические системы БЛА, оснащенные полноценной системой автоматического управления требуют минимальной подготовки наземного персонала, при этом решают задачи на большом удалении от места базирования, вне контакта с наземной станцией, в любых погодных условиях. Они просты в эксплуатации, мобильны, быстро развертываются и не требуют наземной инфраструктуры. Можно утверждать, что высокие характеристики систем БЛА, оснащенных полноценной САУ, снижают эксплуатационные издержки и требования к персоналу.