Технологии погружения металлического шпунта вблизи существующих зданий с обеспечением их безопасности и недопущения неравномерных осадок их фундаментовРефераты >> Строительство >> Технологии погружения металлического шпунта вблизи существующих зданий с обеспечением их безопасности и недопущения неравномерных осадок их фундаментов
В настоящее время отсутствуют эффективные способы защиты зданий от колебаний. Существует только один надежный путь – уменьшение исходного уровня колебаний, возникающих при вибрационном погружении и извлечении.
Во ВНИИГСе были проведены экспериментальные исследования с целью выяснения влияния на уровень колебаний грунта следующих факторов: вибрационных параметров погружаемых элементов и их размеров, образования грунтовой пробки в процессе погружения, изменения направленности колебаний погружаемого элемента, извлечения грунта из полости погружаемого трубчатого элемента (лидирование и опережающая выемка), выбега после отключения электродвигателя вибропогружателя [1].
Вибропогружатели металлического шпунта имеют частоты 16 – 25 Гц, которые менее опасны для окружающих зданий. В связи с этим при устройстве шпунтовых ограждений основным мероприятием по уменьшению уровня колебаний грунта является применение динамического торможения при выбеге вибропогружателя.
Вдавливание свай и шпунта является одним из надежных и простых способов устройства свайных фундаментов и ограждений котлованов вблизи существующих зданий и сооружений, а также в условиях реконструкции.
Способ вдавливания свай имеет следующие преимущества: отсутствуют динамические нагрузки на погружаемую сваю и рядом расположенные здания и сооружения; ликвидируются шум и загазованность воздуха, что удовлетворяет условиям охраны окружающей среды; энергоемкость значительно ниже, чем у ударного и других способов.
Необходимость генерирования минимального уровня колебаний при использовании вибрационного метода в фундаментостроении заставляет предъявлять жесткие требования к вибрационной технике и технологии производства работ. Наиболее ярким примером этого являются вибрационная техника и технология погружения (извлечения) металлического шпунта.
Применение шпунта при устройстве фундаментов вблизи существующих зданий обусловлено широким спектром решаемых с его помощью задач. Например, весьма надежным средством борьбы с образованием воронки оседания и предотвращения продольного прогиба протяженных зданий и сооружений, а также для выравнивания осадки гибких сооружений, возводимых на слабых грунтах, является разъединительный шпунтовый ряд [5]. Наиболее экономичными и быстровозводимыми являются рабочие и приемные шахты, необходимые при микротуннелировании – современной технологии прокладкитрубопроводов или футляров (кожухов инженерных сетей, стволы которых устраиваются возведением шпунтового ограждения) [6].
Использование вибропогружателей для погружения шпунта вблизи существующих зданий полностью не исключает опасность неравномерных осадок. Самый надежный путь защиты зданий – уменьшение исходного уровня колебаний, генерируемых при вибрационном погружении или извлечении шпунта. Частично решить эту задачу удается с помощью так называемых «городских» вибропогружателей, вибрационные параметры которых являются результатом теоретических и экспериментальных исследований. Однако сложным вопросом остается регулирование статического момента массы дебалансов. В процессе работ величина статического момента массы дебалансов и, соответственно, амплитуда колебаний вибрирующей системы должны обеспечивать погружение, т.е. вибрирование погружаемого элемента относительно прилегающего к нему грунта в условиях эффективного проскальзывания («срыва»), иначе говоря, отсутствие «присоединенной» к элементу массы грунта. Эффективность такого решения объясняется тем, что в состоянии «срыва» шпунта относительно прилегающего грунта интенсивность затухания колебаний в нем возрастает, а отношение амплитуд колебаний погружаемого элемента и окружающего его массива грунта составляет два-три порядка.
На фундаменты, расположенные вблизи места погружения (извлечения), существенно влияют процессы пуска и «выбега» (остановки) вибропогружателя, так как при этом в грунте могут возбуждаться резонансные колебания, амплитуда которых значительно превышает амплитуду колебаний в рабочем режиме. При достаточной мощности привода скорость прохождения через резонанс во время пуска достаточна велика (по опытным данным ВНИИГС время выхода вибропогружателя В-402 на номинальное число оборотов в процессе пуска не превышает 0,5 с), и амплитуда колебаний грунта, а также расположенных вблизи зданий и сооружений не успевает достичь опасных значений. Для вибропогружателей других типов при недостаточной мощности привода существует опасность затяжного пуска, требующая принятия специальных мер виброзащиты.
Экспериментально установлено, что при выбеге вибропогружателя на поверхности грунта в течение нескольких секунд возбуждаются резонансные колебания, амплитуда которых в зависимости от грунтовых условий (типа погружаемого элемента и т.п.) может практически в два раза превысить амплитуду колебаний грунта при номинальном режиме работы вибропогружателя.
В качестве меры борьбы с этим опасным явлением в современных «городских» вибропогружателях применяется динамическое торможение приводного двигателя для ускоренного прохождения через резонанс. Это позволяет значительно снизить резонансные амплитуды во время «выбега» при одновременном сокращении времени их воздействия.
В настоящее время все большее применение находят гидравлические вибропогружатели различных производителей, приводимые в действие от автономно стоящих дизельных силовых агрегатов или от гидравлических систем экскаваторов. Вибропогружатели работают от автономного дизельного агрегата. Дизельный молот приводит в действие гидравлические насосы, которые прокачивают масло в вибропогружатель и обеспечивают работу мотора вибратора. Агрегаты оснащены противошумовыми глушителями. Управление, контроль и регулировка происходят с помощью электронной системы управления с пульта ДУ или бескабельного радиоуправления (рис. 20).
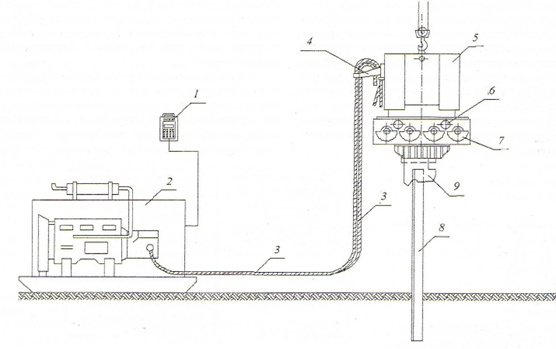
Рис. 20. Принципиальная схема компоновки комплекта оборудования для работы гидравлического вибропогружателя
1 – дистанционное управление; 2 – дизельный агрегат; 3 – гидравлические масляные шланги; 4 – эластичная подвесная опора шлангов; 5 – амортизатор; 6 – гидравлический двигатель; 7 – дебаланс; 8 – погружаемый элемент; 9 – гидравлические зажимы
Как указывается, например в [7,8], вибрационное погружение шпунта и других элементов с относительно малым лобовым сопротивлением вблизи существующих фундаментов необходимо выполнять высокочастотными вибропогружателями (с частотой не менее 30 Гц), желательно с плавным регулированием параметров колебаний. На необходимость снижения амплитуды колебаний указывалось еще в [10]. Дальнейшие экспериментальные исследования подтвердили необходимость повышения частоты вынужденных колебаний с целью снижения уровня колебаний окружающего грунта [9]. За рубежом применение высокочастотных вибропогружателей (38 Гц) в условиях плотной городской застройки является обязательным. Таким образом, для вибропогружателей, предназначенных для погружения (извлечения) шпунта и других элементов с относительно малым лобовым сопротивлением вблизи существующих зданий, частота вынужденных колебаний должна находиться в пределах 30–38 Гц, причем глубина регулирования частоты весьма мала. Поэтому фактически достаточно иметь постоянную величину частоты, находящуюся в вышеуказанном диапазоне.