Кинематический анализ и расчет станкаРефераты >> Технология >> Кинематический анализ и расчет станка
 |
 |
Принимаем стандартное значение f = 1.41, тогда теоретический ряд будет: 33, 47, 66, 186, 262, 370, 522, 735, 1040, 1470.
Далее определяем допустимое отклонение по формуле:
 |
Таким образом, отклонения фактического ряда от теоретического находятся в допустимых пределах.
Определяем вид структуры коробки скоростей – множительная или сложенная.
Для множительной структуры структурная формула имеет вид:
Где k – число групп передач в коробке скоростей.
Р – общее число передач в группе
Р1 – основная группа, передаточные отношения кинематических пар в этой группе составляют ряд со знаменателем f, переключение их последовательно изменяет частоту оборотов на шпинделе – n1, n2, n3, …;
Положение каждой группы в формуле определяется конструктивным расположением их в коробке скоростей. И для нашего станка имеем:
 |
Следовательно, в данном станке на первом месте стоит вторая размножающая группа, на втором – основная и на третьем – первая размножающая группа.
Сложенная структура представляет собой сумму обычных множительных структур и как бы содержит две и более кинематических цепей. Одна структура – основная, она используется для получения всех скоростей на шпинделе, остальные – дополнительные, они используются для части скоростей.
между валами II – IV структурная формула может быть записана как сложенная:
 |
Сложенные структуры позволяют обеспечивать большие диапазоны регулирования коробок скоростей, при этом все значения передаточных отношений находятся в требуемых пределах. В этих структурах высокие скорости получаются с помощью коротких кинематических цепей, что увеличивает КПД привода.
т.е. несколько выходит за пределы допустимого.
Итак, коробка скоростей станка 1П 365 имеет сложенную структуру, состоящую из шестиступенчатой основной множотельной структуры и одинарного перебора. Передаточные отношения всех зубчатых пар находятся в пределах рекомендуемого интервала, за исключением пары 20/86.
6. Лучевая диаграмма скоростей.
Лучевая диаграмма скоростей представляет собой графическую зависимость скорости резания от диаметра заготовки или диаметра инструмента и частоты оборотов для всех частот станка.
Аналитическая зависимость выражается уравнением:
где v – скорость резания; м/мин
D – диаметр заготовки или инструмента; мм
n – частота вращения шпинделя; об/мин
Лучевая диаграмма скоростей служит для быстрого определения n по заданным v и D.
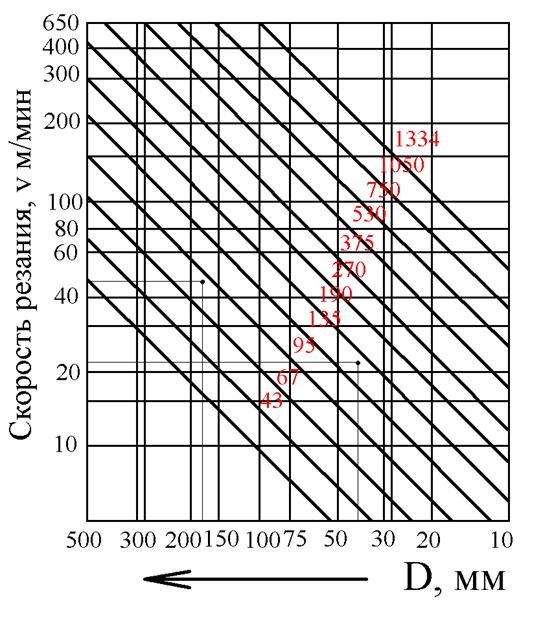 |
Рисунок 5.
7. Кинематика механизмов подач.
 |  | ||||||||||||||||